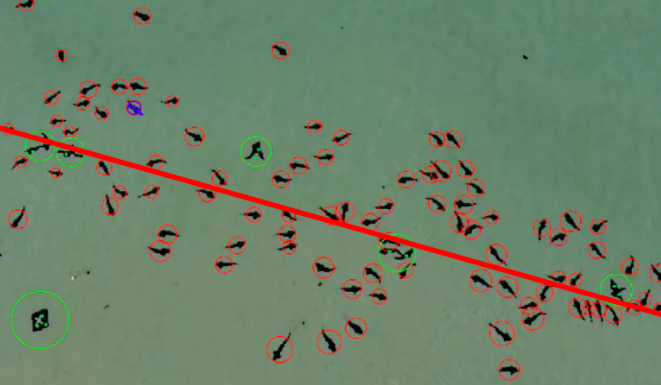
Hi, I’m Cherie! I’m a PhD Student in the Robotics Institute at Carnegie Mellon University advised by Sebastian Scherer. I am part of the Air Lab and the Field Robotics Center. I did my undergrad at Harvey Mudd College, where I worked with Chris Clark on shark-tracking underwater robots. Between Harvey Mudd and CMU, I cofounded Zenith Robotics with Chris Clark and Vai Viswanathan.
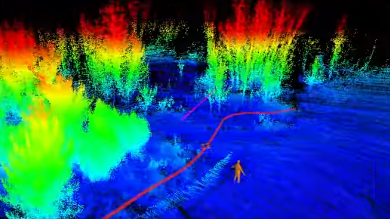
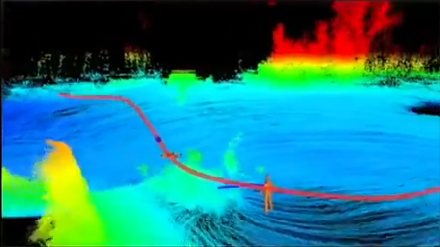
My research interest is in the intersection of field robotics, computer vision and machine learning towards the goal of bringing robots to uncertain safety-critical environments. Specifically, I develop robot learning algorithms to enable reliable autonomy in dynamic real-world applications, such as motion capture in forests, search and rescue in underground mines, and now offroad driving.

Selected News
- May-Aug 2021 Spending this summer at Microsoft working on “Pretraining for Safety” with Ashish Kapoor and Shuang Ma!
- Jul 2021 Paper on multi-drone human reconstruction accepted at IROS 2021!
- April 2021 Excited to give invited talks at Apple and Lehigh University. Watch the Lehigh talk here.
- Aug 2020 Excited to give an invited talk at UIUC’s ACRL Lab.
- Jul 2020 Mohammadreza and I gave a tutorial session on “Guaranteeing Safety in the Real World”. Watch our talk here! Play with control barrier functions here!
- May 2019 I was awarded the Croucher Foundation Scholarship for the next two years!
Publications
Journals
Rogerio Bonatti, Wenshan Wang, Cherie Ho, Aayush Ahuja, Mirko Gschwindt, Efe Camci, Erdal Kayacan, Sanjiban Choudhury, Sebastian Scherer
Journal of Field Robotics, 2019
[PDF] [Video]
Peer-reviewed Conferences

Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
Rogerio Bonatti, Cherie Ho, Wenshan Wang, Sanjiban Choudhury, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2019
[PDF] [Video]
Cherie Ho, Kimberly Joly, Andrew P Nosal, Christopher G Lowe, Christopher M Clark
ACM Symposium on Applied Computing (SAC), 2017
[PDF]
Workshops
Cherie Ho, Jay Patrikar, Rogerio Bonatti, Sebastian Scherer
RSS Workshop on Robust Autonomy, 2020
[PDF][Video]

Cherie Ho*, Katherine Shih*, Jaskaran Singh Grover, Changliu Liu, Sebastian Scherer
RSS Workshop on Robust Autonomy, 2020
[PDF][Video][Code]
Best Paper Finalist
Rogerio Bonatti, Wenshan Wang, Cherie Ho, Aayush Ahuja, Mirko Gschwindt, Efe Camci, Erdal Kayacan, Sanjiban Choudhury, Sebastian Scherer
IROS Workshop on Vision-based Drone Navigation, 2019
[PDF]

Spotlight Talk
Sam Zeng, Vaibhav Viswanathan, Cherie Ho and Sebastian Scherer
NeurIPS Workshop on Imitation Learning and its Challenges in Robotics, 2018
[PDF]
Working Paper
Cherie Ho, Jay Patrikar, Rogerio Bonatti, Sebastian Scherer
Preprint, 2020
[Video]
Honors & Awards
- 2019-2021 Croucher Scholarship for Doctoral Study (Full Scholarship)
- 2019 Best Paper Finalist, IROS Vision-based Drones Workshop
- 2018 HMC INQ Inaugural Class (Harvey Mudd Startup Incubator)
- 2017 Harvey Mudd College Johnson Excellence in Engineering Award
- 2017 Harvey Mudd College Engineering Departmental Honors
- 2016 University of Southern California Wrigley Institute Graduate Summer Fellowship (as an undergraduate)
- 2014 - 2017 Jude and Eileen Laspa Fellowship in Autonomous Systems
- 2015 First Place, MuddHacks (Gesture-controlled helicopter)